
Accelerating the future
First-tier contract manufacturer of (opto-) mechatronic systems
Quick links
Technologies
With our extensive technical knowhow, we provide all solutions for large, high-tech machine manufacturers (OEMs), under one roof.
Realization
Next to our technical expertise, we possess the skills and facilities to realize the best fitting solution for our customers.
Who we are
Accelerating the Future Together
As a first-tier contract manufacturer in (opto-) mechatronic systems and mechanical modules, we take the technological development of our OEM customers to the next level.
Focus areas
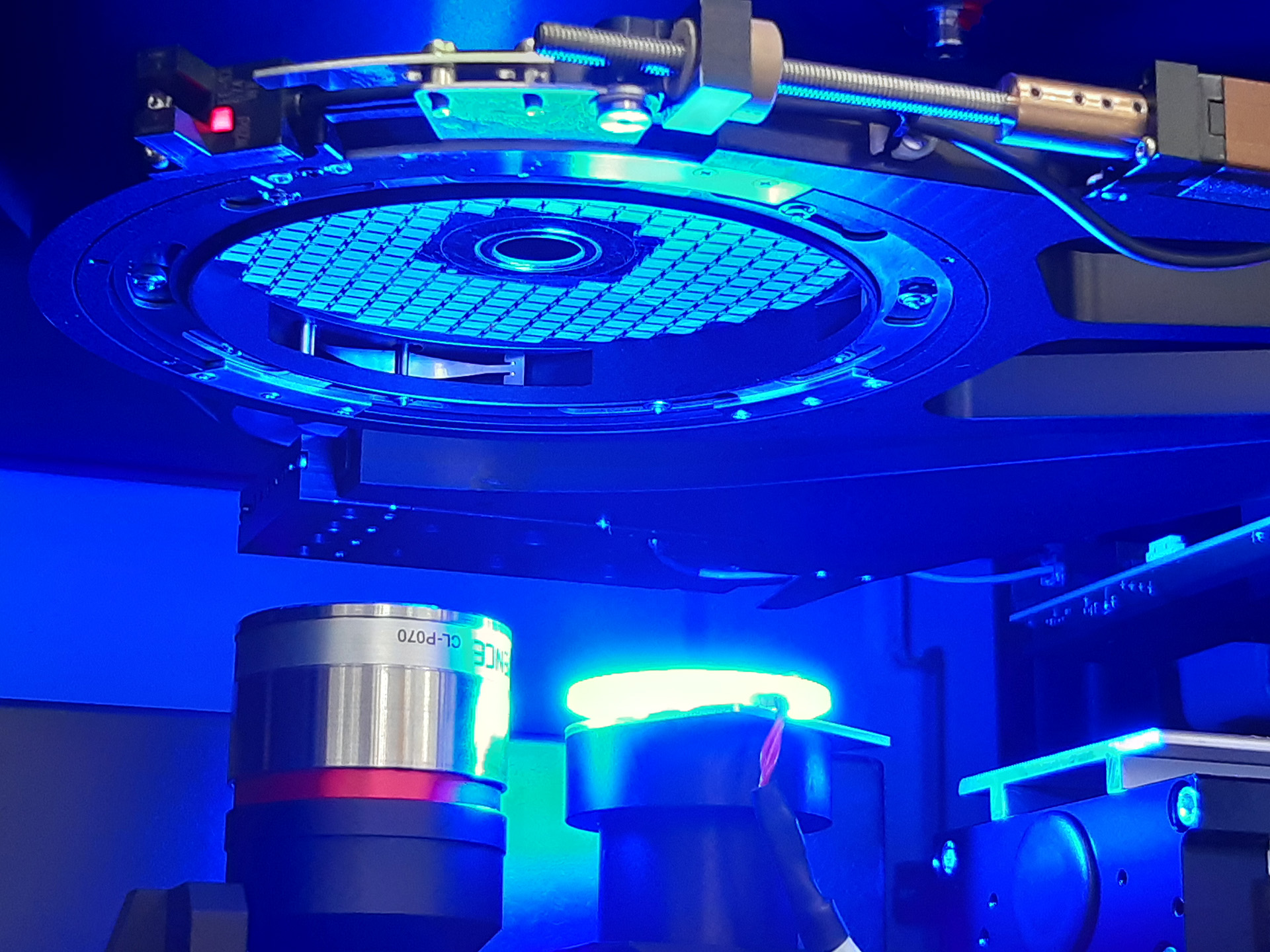
Semiconductor
The semiconductor market is innovating rapidly. In front-end and back-end semiconductor technology, we maximize value.
Semiconductor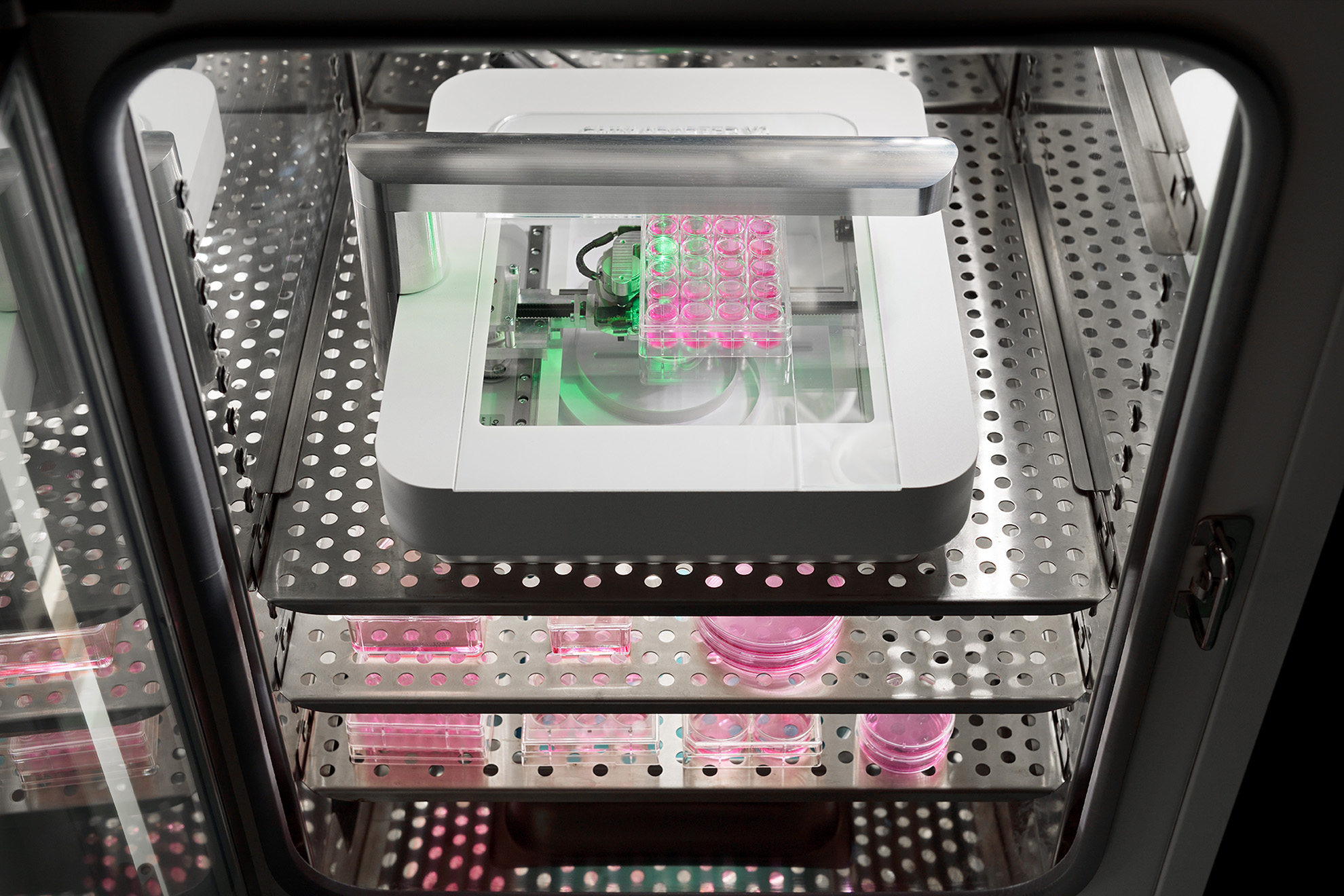
Analytical
Whether we’re talking analytical microscopes, mass spectroscopy or flow cytometry – the analytical market is all about innovation.
Analytical Market
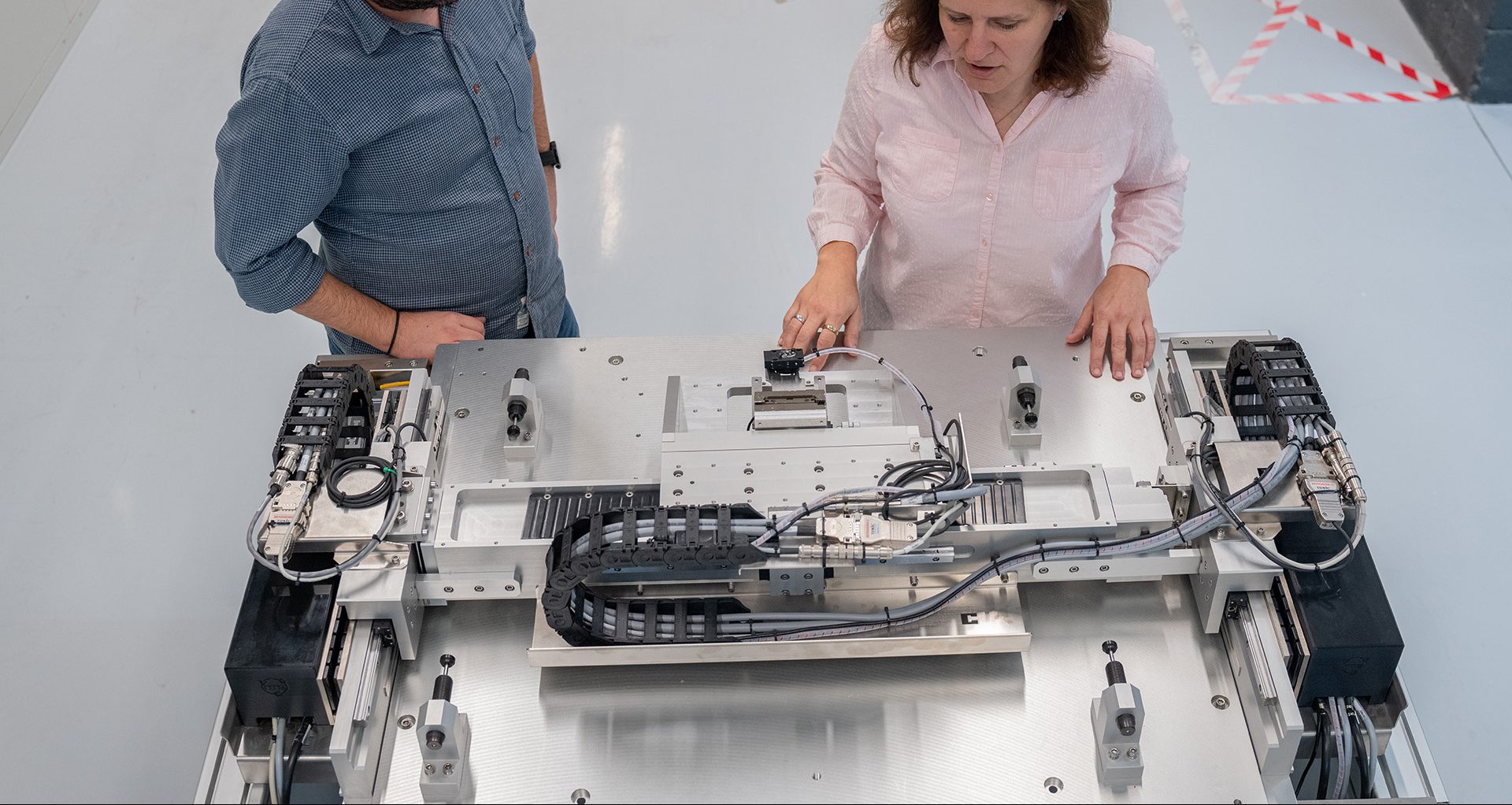
Health & Industry
The high quality and precision requirements of our core markets also apply to our solutions for medical and industrial sector.
Health & Industry Market



NTS in Numbers
0
Approach
0
Countries
0
Years of Experience
0
Million revenue
0
Colleagues


